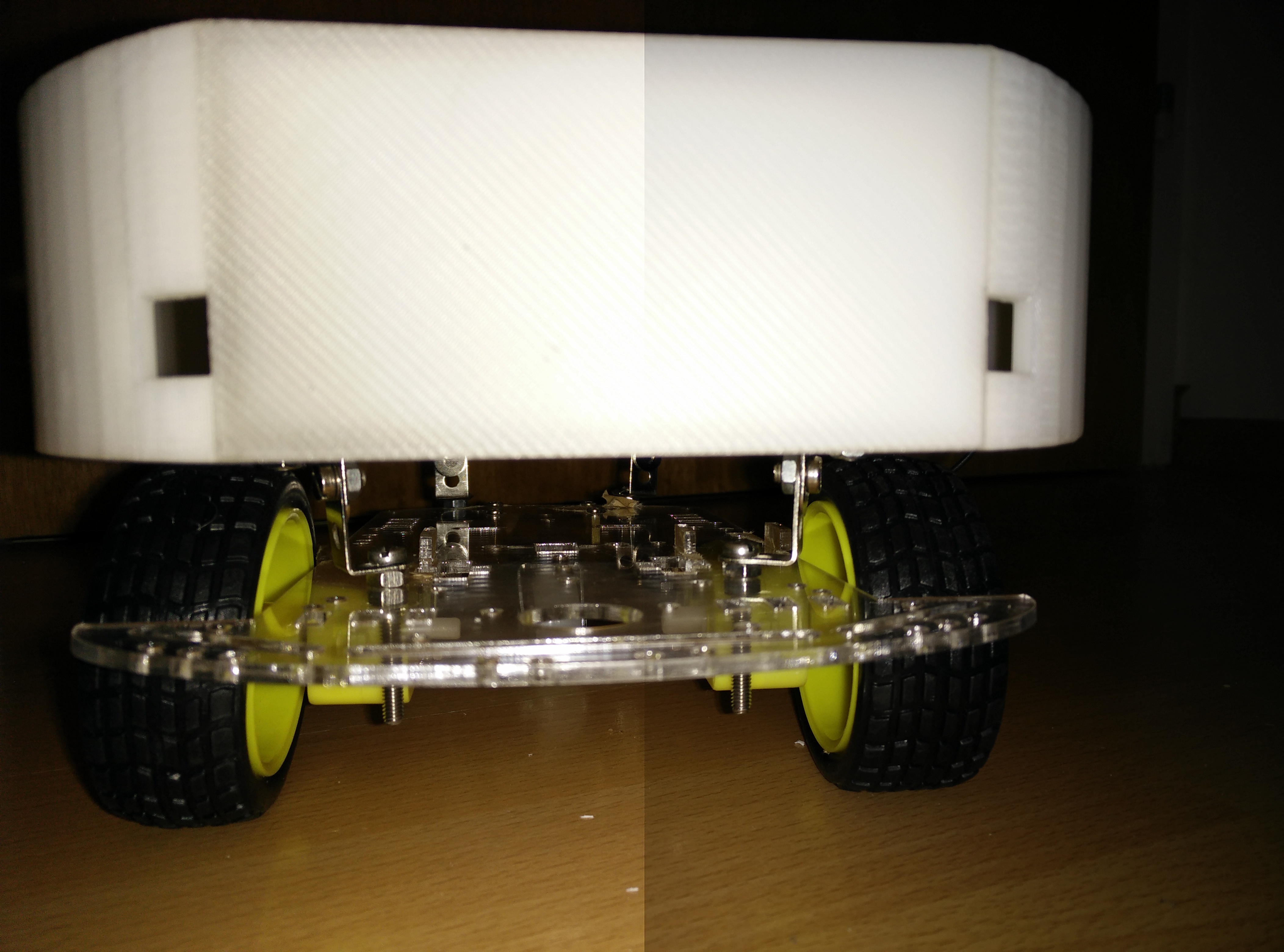
Nach langer Zeit des Stillstands, wurde gestern am Pirol 2.0 weiterentwickelt. Nachdem nun die neuen Räder und Motoren angekommen waren, hat der Pirol nach ein paar Stunden Arbeit endlich wieder einen fahrbaren Untersatz bekommen. Leider konnte ich die Motoren nicht in die im Gehäuse integrierten Motorhalterungen bauen. Die Achsen der neuen Motoren sind schlichtweg zu kurz um weit genug aus dem Gehäuse zu ragen. Darum habe ich die mitgelieferte Basisplatte verwendet und die ganze Konstruktion dann mit Abstandshaltern unter mein eigentliches Gehäuse gebaut. Leider liegt dadurch der Schwerpunkt ein bisschen höher als vorher was zur Folge hat, dass der Roboter nicht mehr ganz so stabil auf den ,,Beinen“ steht. Allerdings noch stabil genug, dass er nicht umkippt. Der Vorteil ist, dass ich meine Fühler, Scheinwerfer und eventuell ein paar Akkus mit auf die untere Platte gebaut werden können. Dadurch ist im Gehäuse selber mehr Platz für weitere Technik. Ein erster Fahrversuch (ohne Sensorik) verlief gut und stabil. Als nächstes werden die Fühler und weitere Technik eingebaut. Anschließend werden dann die einzelnen Elemente im Gehäuse verschraubt. Sobald die Fühler eingebaut sind, werde ich hier auch noch ein kleines Video posten. Jetzt bin ich aber erst einmal froh, dass es wieder voran geht und der erste Fahrtest nach langem so positiv verlief.
Hier noch ein paar Bilder vom aktuellen Stand:
[custom_gallery source=“media: 441,442,443,444,446,447″ link=“lightbox“]
Neueste Kommentare